For humans, it can be challenging to manipulate thin flexible objects like ropes, wires, or cables. But if these problems are hard for humans, they are nearly impossible for robots. As a cable slides between the fingers, its shape is constantly changing, and the robot’s fingers must be constantly sensing and adjusting the cable’s position and motion.
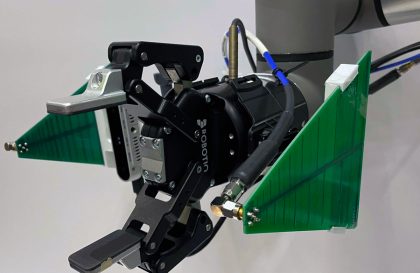
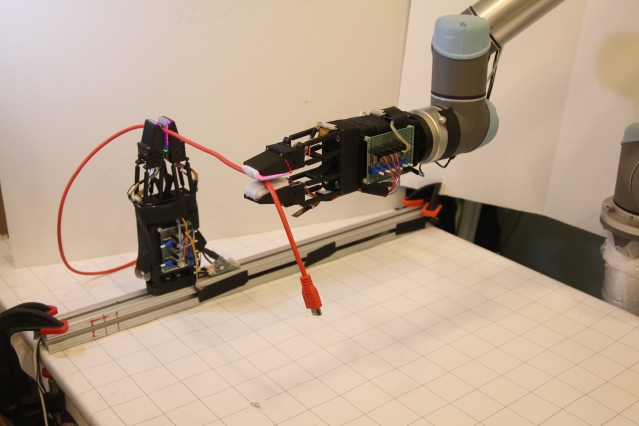
Recently, a group of researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and from the MIT Department of Mechanical Engineering pursued the task from a different angle, in a manner that more closely mimics us humans. The team’s new system uses a pair of soft robotic grippers with high-resolution tactile sensors (and no added mechanical constraints) to successfully manipulate freely moving cables.
Yu She from MIT explains the robot as follows;
Manipulation of flexible cables is relevant to both industrial and household environments. In this work, we develop a perception and control framework to enable robots to accomplish the task of following a cable. We rely on a vision-based tactile sensor, GelSight, to estimate the pose of the cable in the grip as well as the friction forces during cable sliding. We decompose the behaviour of cable following into two tactile-based controllers: 1) Cable grip controller, where a PD controller combined with a leaky integrator are responsible for regulating the gripping force to maintain the frictional sliding forces close to a suitable value; and 2) Cable pose controller, where an LQR controller based on a learned linear model of the cable sliding dynamics is in charge of keeping the cable centred and aligned on the fingertips to prevent the cable from falling.
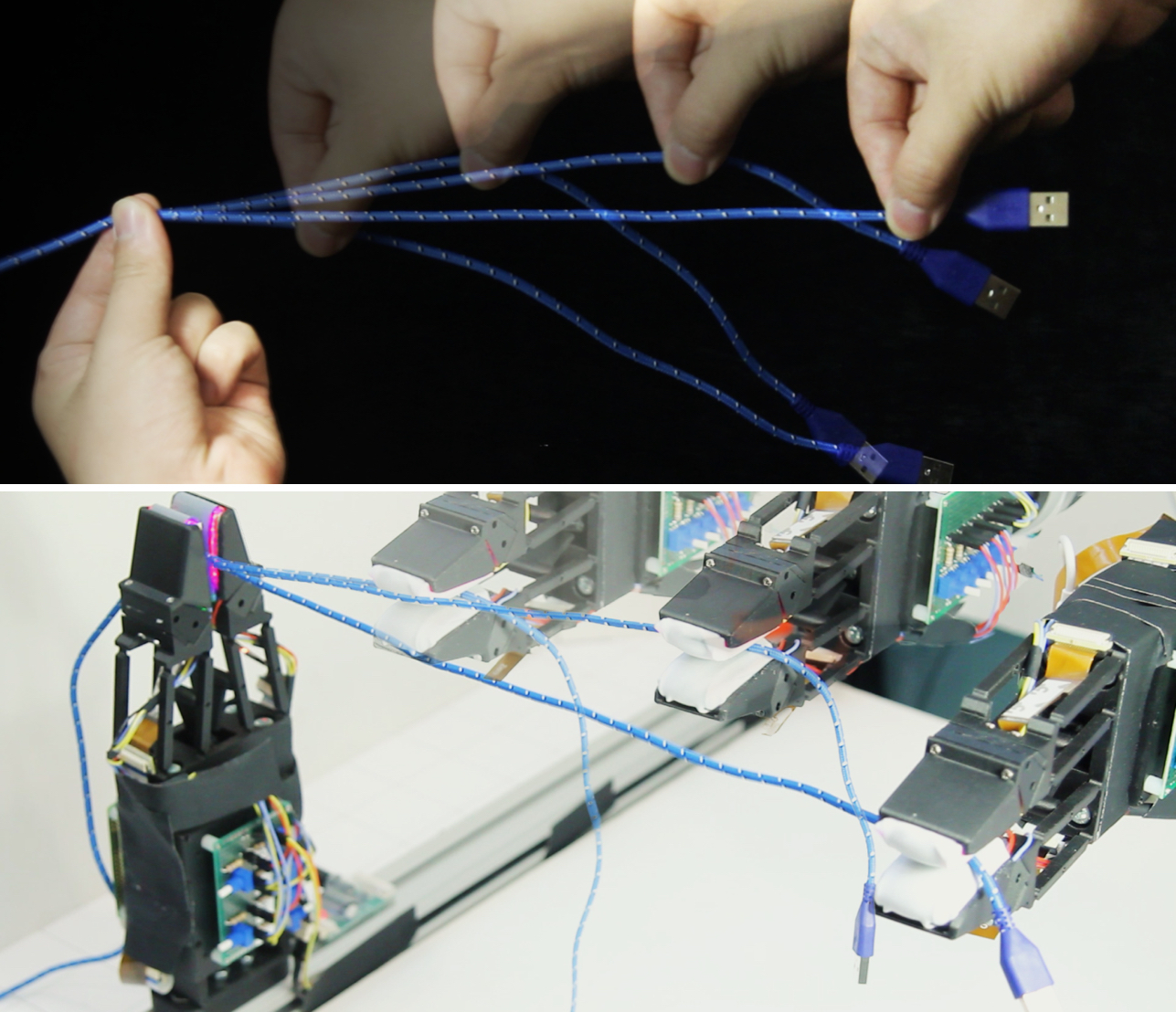
This behavior is enabled by a designed reactive gripper with force and position control capabilities fitted with GelSight-based high resolution tactile sensors. With the proposed framework, we show that the robot can follow one meter of cable in a random configuration from beginning to end within 2-3 hand regrasps. We further demonstrate that the closed-loop system adapts to cables with different materials and thicknesses, moving at different target velocities.
References
Original paper; https://arxiv.org/pdf/1910.02860.pdf
Researcher’s webpage; https://sites.google.com/view/yu-she